Tactile Embodied AI Startup NeoteAI Raises Nearly $10M in Angel Round
In a paradigm shift from vision-centric embodied intelligence, Shanghai-based NeoteAI pioneers the integration of high-fidelity tactile sensing into robotic perception and control — backed by Shanghai Science & Technology Innovation Group and Fudan University.
The Critical Gap: Vision Alone Isn’t Enough
For the past two years, embodied AI research has overwhelmingly prioritized visual perception, aiming to “teach robots to see the world.” But real-world fine manipulation reveals a stark truth:
The bottleneck isn’t seeing — it’s feeling what happens after contact.
Consider these common failures:
– A robot visually aligns a USB connector — yet fails to sense insertion resistance or apply optimal force.
– It grasps fabric successfully — but cannot detect micro-slippage or tension distribution, making wrinkle-free folding impossible.
As industry consensus confirms: most precision operation failures occur post-contact, not during visual recognition.
NeoteAI’s Strategic Pivot: Touch as First-Class Sensory Modality
On May 27, NeoteAI (New Intelligence Embodied AI) — spun out from the Fudan University Trusted Embodied Intelligence Institute — announced a nearly $10 million angel round, co-led by Shanghai Science & Technology Innovation Group and Fudan Innovation Capital, with participation from Ce Yuan Fund and advisory support from Multidimensional Capital.
This funding accelerates NeoteAI’s mission: transforming tactile sensing from an optional add-on into a foundational, trainable layer of embodied intelligence.

Why Touch? Human Intuition, Digitally Replicated
Humans perform fine manipulation effortlessly via subconscious tactile feedback:
– ✅ Adjusting wrist angle upon feeling edge resistance;
– ✅ Dynamically modulating grip strength based on cup wall deformation;
– ✅ Changing pull direction in response to fabric tension gradients.
Robots lack this capability — because current sensing is fragmented, low-resolution, and algorithmically inflexible.
NeoteAI’s core thesis: Embodied AI is evolving from “vision-centric” → “vision + touch dual-core” architecture:
– Vision: Global localization & semantic understanding;
– Touch: Real-time physical state feedback & dynamic motion correction during interaction.
Technical Breakthrough: Vision-Tactile Sensors
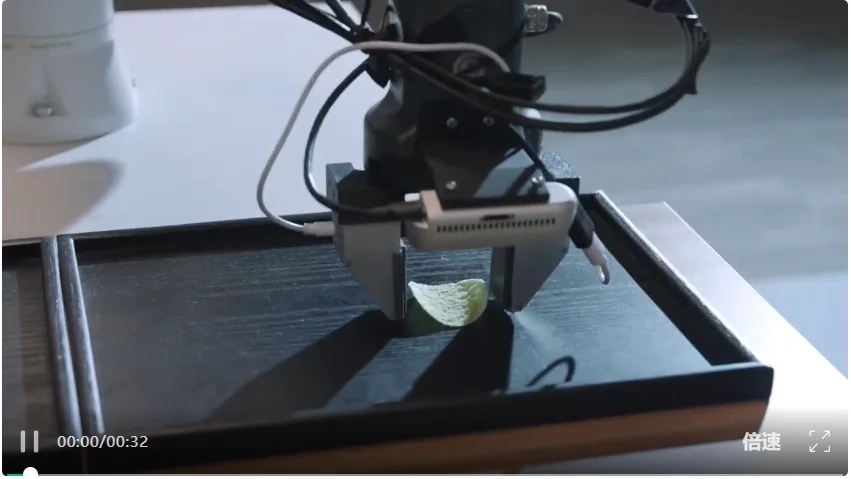
NeoteAI’s first hardware innovation is its proprietary vision-tactile sensor, designed for industrial grippers and dexterous hands:

△ NeoteAI Vision-Tactile Sensor
Unlike traditional resistive/capacitive sensors (which output sparse, single-point force values), NeoteAI’s solution embeds a micro-optical camera inside a compliant silicone layer. It captures sub-millimeter surface deformations and uses on-device deep learning to decode:
– 6-axis force vectors;
– Slip trajectories;
– Object boundary contours;
– Pixel-level pressure field maps.
Key Advantages:
🔹 High-Density Contact Representation: Captures full-contact geometry, texture, and deformation — not just magnitude.
🔹 Algorithmic Scalability: Perception quality improves with software updates, unlike fixed-hardware alternatives.
🔹 Transformer-Ready Data Format: Output is image-aligned and compatible with ViT/CLIP-style architectures — enabling seamless fusion with vision-language-action (VLA) models.
Scaling the Foundation: Tactile-Embodied Data Infrastructure
Hardware alone is insufficient. NeoteAI built a 1,000+ m² dedicated tactile-embodied data collection center, targeting high-value, contact-critical tasks:
– USB insertion, screw driving, RAM module installation;
– Cable harness assembly, thin-walled container handling, elastic part manipulation;
– Fabric smoothing, paper folding, tape application.

△ NeoteAI — Large-Scale Vision + Tactile Embodied Data Collection
Its hybrid acquisition system includes:
– True-Robot Line: Standardized robotic arms with synchronized, self-developed vision-tactile sensors and force feedback;
– Portable UMI Terminal: Low-cost, cross-platform tactile capture device enabling rapid deployment across diverse robot brands.
NeoteAI adopts a bold scaling strategy: “Scale First, Optimize Later.” While language models train on billions of tokens, embodied datasets remain in the millions — limiting generalization. NeoteAI prioritizes massive, consistent tactile interaction data — currently used exclusively for internal model training, with data-as-a-service planned post-maturity.
From Data to Intelligence: Tactile-Enhanced Models
Data fuels three integrated technical pillars:
1. Vision-Tactile Sensors (hardware);
2. Tactile-Embodied Data Platform (infrastructure);
3. Tactile-World Models & VTLA (AI).
△ NeoteAI — Fine Manipulation Enabled by Tactile-Embodied Large Models
- VTLA (Vision-Tactile-Language-Action): Replaces blind visual action prediction with real-time tactile feedback loops — detecting slip, deformation, and contact status to guide precise completion.
- Tactile World Models: Learn physics-aware dynamics of soft/flexible objects — where pure vision fails — boosting success rates in delicate assembly.
- Reinforcement Learning with Tactile Signals: Uses tactile anomalies (e.g., abnormal resistance, unstable grip) as immediate reward-shaping signals for adaptive policy refinement.
Commercial Validation: Factory-First Deployment
NeoteAI targets industrial automation as its initial commercial beachhead — for compelling reasons:
– ✅ Structured, repeatable tasks;
– ✅ Quantifiable ROI (cycle time, defect rate, labor cost);
– ✅ Lower generalization demands than consumer environments;
– ✅ High tactile impact (e.g., wire harness routing, memory module insertion, textile handling).
Leveraging Shanghai’s dense ecosystem of automotive, electronics (3C), and home textiles manufacturers, NeoteAI has secured multiple POC validation orders across precision manufacturing lines.
The Founder Dream Team: Academia × Industry × Vision
| Role | Name | Background |
|---|---|---|
| CEO | Shihao Zhao | Fudan B.S./M.S.; HKU Ph.D.; ex-Microsoft Research, Alibaba Tongyi Lab (video world models, generative AI) |
| Chief Scientist | Zuxuan Wu | Deputy Director, Fudan Trusted Embodied Intelligence Institute; ex-Meta (video & multimodal foundation models) |
| COO | Daoguo Dong | Ex-Huawei Honor Magic Gen-1 Chief Architect; 20+ years in product engineering; current Fudan researcher guiding commercialization |


△ Left to right: Shihao Zhao, Zuxuan Wu, Daoguo Dong
A New Entry Point: Making Touch Non-Negotiable
NeoteAI’s strategic insight is clear: In an increasingly crowded, capital-intensive vision-first landscape, true differentiation lies in solving unaddressed physics bottlenecks.
“Understanding a task is entry-level embodied intelligence. Adjusting actions in real time during physical interaction — that’s the next competitive frontier.”
By elevating tactile perception to a first-class, standardized, and scalable data modality — NeoteAI isn’t just building better robots. It’s redefining what embodied intelligence means.
Article adapted from QuantumBit; author: Yun Zhong.